Определение
Понятие «сила тяги» часто встречается в задачах по физике, когда речь идеи о механической мощности или движении транспорта. Вообще говоря, это гипотетическая сила, которая вводится для удобства при решении задач.
Поясним эту мысль. Рассмотрим движение автобуса. Сила тяги (обозначим ее как ${\overline{F}}_t$) в этом случае является силой трения покоя, которая действует на нижние точки колес со стороны поверхности шоссе. Для реализации движения автобуса по дороге колеса транспортного средства вращает двигатель так, чтобы сила трения была направлена в сторону перемещения (рис.1). В этом случае силу тяги определим как силу трения, которая возникает между ведущими колесами и поверхностью, по которой колеса катятся. Если сила трения отсутствует (колесо находится на льду), то автобус не двигается с места, так как колеса проскальзывают. Трение, которое появляется между колесами и поверхностью дороги создает поступательное перемещение.
Так как сила тяги зависит от силы трения, то для увеличения величины $F_t\ $ следует увеличить трение. Трение увеличивается при росте коэффициента трения и (или) с увеличением силы нормального давления, которое зависит от массы тела.
Возникает вопрос о необходимости введения некоей силы тяги вместо того, чтобы использовать привычную силу трения. При выделении из внешних сил, которые действуют на наш автобус силы тяги и силы сопротивления движению уравнения движения имеют универсальный вид, и, используя силу тяги, просто выражается полезная механическая мощность ($N$):
где $\overline{v}$ - скорость движения тела (у нас автобуса).
Отметим, что у силы тяги нет четко определенной формулы, как, например, у гравитационной силы или силы Архимеда и других сил. Ее часто вычисляют, используя второй закон Ньютона и рассматривая все силы, которые действуют на тело.
Реактивная сила тяги
Уравнения движения тел переменной массы и формулу для вычисления реактивной силы получил первым И.В. Мещерский в 1897 г. Формула реактивной силы является основой для расчета силы тяги ракетных и турборакетных двигателей всех систем.
Пусть ракета перемещается со скоростью $\overline{v}$ относительно Земли. Вместе с ней с такой же скоростью движется часть топлива, которая сгорает в ближайшую секунду. При сгорании продукты горения этой части топлива получают дополнительную скорость $\overline{u}$ относительно ракеты. Относительно Земли они имеют скорость $\overline{v}-\overline{u}$. При этом сама ракета увеличивает скорость. После выброса продукты горения не взаимодействуют с ракетой. Поэтому систему ракета плюс продукты горения топлива рассматривают как систему из двух тел, которые взаимодействуют при горении по законам неупругого удара. Пусть реактивный двигатель ракеты каждую секунду выбрасывает массу $\mu $ продуктов горения топлива. Используя закон сохранения импульса и второй закон Ньютона получают, что модуль реактивной силы тяги двигателя ($R$) ракеты равен:
Формула (2) показывает, что реактивная сила, которая действует на тело переменной массы, пропорциональна массе отделяющихся частиц за единицу времени и скорости движения этих частиц относительно тела.
Примеры задач с решением
Пример 1
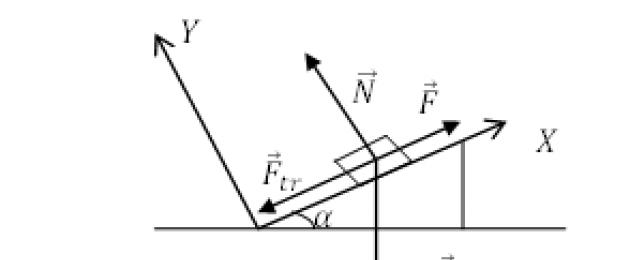
Задание. Сила тяги, действующая на тело, находящееся на наклонной плоскости (рис.2) направлена вдоль этой плоскости вверх (рис.2). Какова ее величина, если масса тела равна $m$, угол наклона плоскости $\alpha ,\ $ускорение движения тела $a$? Коэффициент трения тела о плоскость равен $\mu $. Тело движется с постоянной скоростью в гору.

Решение. Запишем второй закон Ньютона для сил, действующих на тело, учтем, что тело движется равномерно:
Запишем проекции уравнения (1.1) на оси X и Y:
\[\left\{ \begin{array}{c} X:\ -mg{\sin \alpha +\ }F-F_{tr}=0\left(1.2\right);;\ \\ Y:\ N-mg{\cos \alpha =0\left(1.3\right).\ } \end{array} \right.\]
Сила трения связана с силой нормального давления как:
Выразим из (1.3) $N$, используем выражение (1.4), получим из (1.2) силу тяги:
\[-mg{\sin \alpha +\ }F-\mu mg{\cos \alpha \ }=0\to F=\mu mg{\cos \alpha \ }+mg{\sin \alpha .\ }\]
Ответ. $F=mg(\mu {\cos \alpha \ }+{\sin \alpha).\ }$
Пример 2
Задание. Ракету, массой (в начальный момент времени) равной $M,$ запустили вертикально вверх. Относительная скорость выброса продуктов горения равна $u$, расход горючего составляет $\mu $. Каким будет ускорение ракеты через время $t$ после старта, если сопротивление воздуха не учитывать, поле силы тяжести считать однородным.
Решение. Сделаем рисунок.

На ракету (из условий задачи) будут действовать две силы: сила тяжести и реактивная сила тяги. Запишем уравнение движения ракеты:
В проекции на ось Y уравнение (2.1) запишем как:
Реактивная сила тяги может быть найдена как:
Учитывая равенство (2.3) уравнение преобразуем к виду:
\[\mu u-mg=ma\to a=\frac{\mu u-mg}{m}\left(2.4\right).\]
Масса ракеты в момент времени $t$ равна:
Подставим (2.5) в (2.4) имеем:
Ответ. $a=\frac{\mu u}{M-\mu t}-g.$
Второй закон Ньютона \(~m \vec a = \vec F\) можно записать в иной форме, которая приведена самим Ньютоном в его главном труде «Математические начала натуральной философии».
Если на тело (материальную точку) действует постоянная сила, то постоянным является и ускорение
\(~\vec a = \frac{\vec \upsilon_2 - \vec \upsilon_1}{\Delta t}\) ,
где \(~\vec \upsilon_1\) и \(~\vec \upsilon_2\) - начальное и конечное значения скорости тела.
Подставив это значение ускорения во второй закон Ньютона, получим:
\(~\frac{m \cdot (\vec \upsilon_2 - \vec \upsilon_1)}{\Delta t} = \vec F\) или \(~m \vec \upsilon_2 - m \vec \upsilon_1 = \vec F \Delta t\) . (1)
В этом уравнении появляется новая физическая величина - импульс материальной точки.
Импульсом материальной точки называют величину равную произведению массы точки на ее скорость.
Обозначим импульс (его также называют иногда количеством движения) буквой \(~\vec p\) . Тогда
\(~\vec p = m \vec \upsilon\) . (2)
Из формулы (2) видно, что импульс - векторная величина. Так как m > 0, то импульс имеет то же направление, что и скорость.
Единица импульса не имеет особого названия. Ее наименование получается из определения этой величины:
[p ] = [m ] · [υ ] = 1 кг · 1 м/с = 1 кг·м/с.Другая форма записи второго закона Ньютона
Обозначим через \(~\vec p_1 = m \vec \upsilon_1\) импульс материальной точки в начальный момент интервала Δt , а через \(~\vec p_2 = m \vec \upsilon_2\) - импульс в конечный момент этого интервала. Тогда \(~\vec p_2 - \vec p_1 = \Delta \vec p\) есть изменение импульса за время Δt . Теперь уравнение (1) можно записать так:
\(~\Delta \vec p = \vec F \Delta t\) . (3)
Так как Δt > 0, то направления векторов \(~\Delta \vec p\) и \(~\vec F\) совпадают.
Согласно формуле (3)
изменение импульса материальной точки пропорционально приложенной к ней силе и имеет такое же направление, как и сила.
Именно так был впервые сформулирован второй закон Ньютона .
Произведение силы на время ее действия называют импульсом силы . Не надо путать импульс \(~m \vec \upsilon\) материальной точки и импульс силы \(\vec F \Delta t\) . Это совершенно разные понятия.
Уравнение (3) показывает, что одинаковые изменения импульса материальной точки могут быть получены в результате действия большой силы в течение малого интервала времени или малой силы за большой интервал времени. Когда вы прыгаете с какой-то высоты, то остановка вашего тела происходит за счет действия силы со стороны земли или пола. Чем меньше продолжительность столкновения, тем больше тормозящая сила. Для уменьшения этой силы надо, чтобы торможение происходило постепенно. Вот почему при прыжках в высоту спортсмены приземляются на мягкие маты. Прогибаясь, они постепенно тормозят спортсмена. Формула (3) может быть обобщена и на тот случай, когда сила меняется во времени. Для этого весь промежуток времени Δt действия силы надо разделить на столь малые интервалы Δt i , чтобы на каждом из них значение силы без большой ошибки можно было считать постоянным. Для каждого малого интервала времени справедлива формула (3). Суммируя изменения импульсов за малые интервалы времени, получим:
\(~\Delta \vec p = \sum^{N}_{i=1}{\vec F_i \Delta t_i}\) . (4)
Символ Σ (греческая буква «сигма») означает «сумма». Индексы i = 1 (внизу) и N (наверху) означают, что суммируется N слагаемых.
Для нахождения импульса тела поступают так: мысленно разбивают тело на отдельные элементы (материальные точки), находят импульсы полученных элементов, а потом их суммируют как векторы.
Импульс тела равен сумме импульсов его отдельных элементов.
Изменение импульса системы тел. Закон сохранения импульса
При рассмотрении любой механической задачи мы интересуемся движением определенного числа тел. Совокупность тел, движение которой мы изучаем, называется механической системой или просто системой.
Изменение импульса системы тел
Рассмотрим систему, состоящую из трех тел. Это могут быть три звезды, испытывающие воздействие со стороны соседних космических тел. На тела системы действуют внешние силы \(~\vec F_i\) (i - номер тела; например, \(~\vec F_2\) - это сумма внешних сил, действующих на тело номер два). Между телами действуют силы \(~\vec F_{ik}\) называемые внутренними силами (рис. 1). Здесь первая буква i в индексе означает номер тела, на которое действует сила \(~\vec F_{ik}\) , а вторая буква k означает номер тела, со стороны которого действует данная сила. На основании третьего закона Ньютона
\(~\vec F_{ik} = - \vec F_{ki}\) . (5)
Вследствие действия сил на тела системы их импульсы изменяются. Если за малый промежуток времени сила заметно не меняется, то для каждого тела системы можно записать изменение импульса в форме уравнения (3):
\(~\Delta (m_1 \vec \upsilon_1) = (\vec F_{12} + \vec F_{13} + \vec F_1) \Delta t\) , \(~\Delta (m_2 \vec \upsilon_2) = (\vec F_{21} + \vec F_{23} + \vec F_2) \Delta t\) , (6) \(~\Delta (m_3 \vec \upsilon_3) = (\vec F_{31} + \vec F_{32} + \vec F_3) \Delta t\) .
Здесь в левой части каждого уравнения стоит изменение импульса тела \(~\vec p_i = m_i \vec \upsilon_i\) за малое время Δt . Более подробно\[~\Delta (m_i \vec \upsilon_i) = m_i \vec \upsilon_{ik} - m_i \vec \upsilon_{in}\] где \(~\vec \upsilon_{in}\) - скорость в начале, а \(~\vec \upsilon_{ik}\) - в конце интервала времени Δt .
Сложим левые и правые части уравнений (6) и покажем, что сумма изменений импульсов отдельных тел равна изменению суммарного импульса всех тел системы, равного
\(~\vec p_c = m_1 \vec \upsilon_1 + m_2 \vec \upsilon_2 + m_3 \vec \upsilon_3\) . (7)
Действительно,
\(~\Delta (m_1 \vec \upsilon_1) + \Delta (m_2 \vec \upsilon_2) + \Delta (m_3 \vec \upsilon_3) = m_1 \vec \upsilon_{1k} - m_1 \vec \upsilon_{1n} + m_2 \vec \upsilon_{2k} - m_2 \vec \upsilon_{2n} + m_3 \vec \upsilon_{3k} - m_3 \vec \upsilon_{3n} =\) \(~=(m_1 \vec \upsilon_{1k} + m_2 \vec \upsilon_{2k} + m_3 \vec \upsilon_{3k}) -(m_1 \vec \upsilon_{1n} + m_2 \vec \upsilon_{2n} + m_3 \vec \upsilon_{3n}) = \vec p_{ck} - \vec p_{cn} = \Delta \vec p_c\) .
Таким образом,
\(~\Delta \vec p_c = (\vec F_{12} + \vec F_{13} + \vec F_{21} + \vec F_{23} + \vec F_{31} + \vec F_{32} + \vec F_1 + \vec F_2 + \vec F_3) \Delta t\) . (8)
Но силы взаимодействия любой пары тел в сумме дают нуль, так как согласно формуле (5)
\(~\vec F_{12} = - \vec F_{21} ; \vec F_{13} = - \vec F_{31} ; \vec F_{23} = - \vec F_{32}\) .
Поэтому изменение импульса системы тел равно импульсу внешних сил:
\(~\Delta \vec p_c = (\vec F_1 + \vec F_2 + \vec F_3) \Delta t\) . (9)
Мы пришли к важному выводу:
импульс системы тел могут изменить только внешние силы, причем изменение импульса системы пропорционально сумме внешних сил и совпадает с ней по направлению. Внутренние силы, изменяя импульсы отдельных тел системы, не изменяют суммарный импульс системы.
Уравнение (9) справедливо для любого интервала времени, если сумма внешних сил остается постоянной.
Закон сохранения импульса
Из уравнения (9) вытекает чрезвычайно важное следствие. Если сумма внешних сил, действующих на систему, равна нулю, то равно нулю и изменение импульса системы\[~\Delta \vec p_c = 0\] . Это означает, что, какой бы интервал времени мы ни взяли, суммарный импульс в начале этого интервала \(~\vec p_{cn}\) и в его конце \(~\vec p_{ck}\) один и тот же\[~\vec p_{cn} = \vec p_{ck}\] . Импульс системы остается неизменным, или, как говорят, сохраняется:
\(~\vec p_c = m_1 \vec \upsilon_1 + m_2 \vec \upsilon_2 + m_3 \vec \upsilon_3 = \operatorname{const}\) . (10)
Закон сохранения импульса формулируется так:
если сумма внешних сил, действующих на тела системы, равна нулю, то импульс системы сохраняется.
Тела могут только обмениваться импульсами, суммарное же значение импульса не изменяется. Надо только помнить, что сохраняется векторная сумма импульсов, а не сумма их модулей.
Как видно из проделанного нами вывода, закон сохранения импульса является следствием второго и третьего законов Ньютона. Система тел, на которую не действуют внешние силы, называется замкнутой или изолированной. В замкнутой системе тел импульс сохраняется. Но область применения закона сохранения импульса шире: если даже на тела системы действуют внешние силы, но их сумма равна нулю, импульс системы все равно сохраняется.
Полученный результат легко обобщается на случай системы, содержащей произвольное число N тел:
\(~m_1 \vec \upsilon_{1n} + m_2 \vec \upsilon_{2n} + m_3 \vec \upsilon_{3n} + \ldots + m_N \vec \upsilon_{Nn} = m_1 \vec \upsilon_{1k} + m_2 \vec \upsilon_{2k} + m_3 \vec \upsilon_{3k} + \ldots + m_N \vec \upsilon_{Nk}\) . (11)
Здесь \(~\vec \upsilon_{in}\) - скорости тел в начальный момент времени, а \(~\vec \upsilon_{ik}\) - в конечный. Так как импульс - величина векторная, то уравнение (11) представляет собой компактную запись трех уравнений для проекций импульса системы на координатные оси.
Когда выполняется закон сохранения импульса?
Все реальные системы, конечно, не являются замкнутыми, сумма внешних сил довольно редко может оказаться равной нулю. Тем не менее в очень многих случаях закон сохранения импульса можно применять.
Если сумма внешних сил не равна нулю, но равна нулю сумма проекций сил на какое-то направление, то проекция импульса системы на это направление сохраняется. Например, система тел на Земле или вблизи ее поверхности не может быть замкнутой, так как на все тела действует сила тяжести, которая изменяет импульс по вертикали согласно уравнению (9). Однако вдоль горизонтального направления сила тяжести не может изменять импульс, и сумма проекций импульсов тел на горизонтально направленную ось будет оставаться неизменной, если действием сил сопротивления можно пренебречь.
Кроме того, при быстрых взаимодействиях (взрыв снаряда, выстрел из орудия, столкновения атомов и т. п.) изменение импульсов отдельных тел будет фактически обусловлено только внутренними силами. Импульс сис-темы сохраняется при этом с большой точностью, ибо такие внешние силы, как сила тяготения и сила трения, зависящая от скорости, заметно не изменяет импульса системы. Они малы по сравнению с внутренними силами. Так, скорость осколков снаряда при взрыве в зависимости от калибра может изменяться в пределах 600 - 1000 м/с. Интервал времени, за который сила тяжести смогла бы сообщить телам такую скорость, равен
\(~\Delta t = \frac{m \Delta \upsilon}{mg} \approx 100 c\)
Внутренние же силы давления газов сообщают такие скорости за 0,01 с, т.е. в 10000 раз быстрее.
Реактивное движение. Уравнение мещерского. Реактивная сила
Под реактивным движением понимают движение тела, возникающее при отделении некоторой его части с определенной скоростью относительно тела,
например при истечении продуктов сгорания из сопла реактивного летательного аппарата. При этом появляется так называемая реактивная сила, сообщающая телу ускорение.
Наблюдать реактивное движение очень просто. Надуйте детский резиновый шарик и отпустите его. Шарик стремительно взовьется вверх (рис. 2). Движение, правда, будет кратковременным. Реактивная сила действует лишь до тех пор, пока продолжается истечение воздуха.

Главная особенность реактивной силы состоит в том, что она возникает без какого-либо взаимодействия с внешними телами. Происходит лишь взаимодействие между ракетой и вытекающей из нее струей вещества.
Сила же, сообщающая ускорение автомобилю или пешеходу на земле, пароходу на воде или винтовому самолету в воздухе, возникает только за счет взаимодействия этих тел с землей, водой или воздухом.
При истечении продуктов сгорания топлива они за счет давления в камере сгорания приобретают некоторую скорость относительно ракеты и, следовательно, некоторый импульс. Поэтому в соответствии с законом сохранения импульса сама ракета получает такой же по модулю импульс, но направленный в противоположную сторону.
Масса ракеты с течением времени убывает. Ракета в полете является телом переменной массы. Для расчета ее движения удобно применить закон сохранения импульса.
Уравнение Мещерского
Выведем уравнение движения ракеты и найдем выражение для реактивной силы. Будем считать, что скорость вытекающих из ракеты газов относительно ракеты постоянна и равна \(~\vec u\) . Внешние силы на ракету не действуют: она находится в космическом пространстве вдали от звезд и планет.
Пусть в некоторый момент времени скорость ракеты относительно инерциальной системы, связанной со звездами, равна \(~\vec \upsilon\) (рис. 3), а масса ракеты равна М . Через малый интервал времени Δt масса ракеты станет равной
\(~M_1 = M - \mu \Delta t\) ,
где μ - расход топлива (расходом топлива называется отношение массы сгоревшего топлива ко времени его сгорания).

За этот же промежуток времени скорость ракеты изменится на \(~\Delta \vec \upsilon\) и станет равной \(~\vec \upsilon_1 = \vec \upsilon + \Delta \vec \upsilon\) . Скорость истечения газов относительно выбранной инерциальной системы отсчета равна \(~\vec \upsilon + \vec u\) (рис. 4), так как до начала сгорания топливо имело ту же скорость, что и ракета.

Запишем закон сохранения импульса для системы ракета - газ:
\(~M \vec \upsilon = (M - \mu \Delta t)(\vec \upsilon + \Delta \vec \upsilon) + \mu \Delta t(\vec \upsilon + \vec u)\) .
Раскрыв скобки, получим:
\(~M \vec \upsilon = M \vec \upsilon - \mu \Delta t \vec \upsilon + M \Delta \vec \upsilon - \mu \Delta t \Delta \vec \upsilon + \mu \Delta t \vec \upsilon + \mu \Delta t \vec u\) .
Слагаемым \(~\mu \Delta t \vec \upsilon\) можно пренебречь по сравнению с остальными, так как оно содержит произведение двух малых величин (это величина, как говорят, второго порядка малости). После приведения подобных членов будем иметь:
\(~M \Delta \vec \upsilon = - \mu \Delta t \vec u\) или \(~M \frac{\Delta \vec \upsilon}{\Delta t} = - \mu \vec u\) . (12)
Это одно из уравнений Мещерского для движения тела переменной массы, полученное им в 1897 г.
Если ввести обозначение \(~\vec F_r = - \mu \vec u\) , то уравнение (12) совпадет по форме записи со вторым законом Ньютона. Однако масса тела М здесь не постоянна, а убывает со временем из-за потери вещества.
Величина \(~\vec F_r = - \mu \vec u\) носит название реактивной силы . Она появляется вследствие истечения газов из ракеты, приложена к ракете и направлена противоположно скорости газов относительно ракеты. Реактивная сила определяется лишь скоростью истечения газов относительно ракеты и расходом топлива. Существенно, что она не зависит от деталей устройства двигателя. Важно лишь, чтобы двигатель обеспечивал истечение газов из ракеты со скоростью \(~\vec u\) при расходе топлива μ . Реактивная сила космических ракет достигает 1000 кН.
Если на ракету действуют внешние силы, то ее движение определяется реактивной силой и суммой внешних сил. В этом случае уравнение (12) запишется так:
\(~M \frac{\Delta \vec \upsilon}{\Delta t} = \vec F_r + \vec F\) . (13)
Реактивные двигатели
Широкое применение реактивные двигатели в настоящее время получили в связи с освоением космического пространства. Применяются они также для метеорологических и военных ракет различного радиуса действия. Кроме того, все современные скоростные самолеты оснащены воздушно-реактивными двигателями.
В космическом пространстве использовать какие-либо другие двигатели, кроме реактивных, невозможно: нет опоры (твердой, жидкой или газообразной), отталкиваясь от которой космический корабль мог бы получить ускорение. Применение же реактивных двигателей для самолетов и ракет, не выходящих за пределы атмосферы, связано с тем, что именно реактивные двигатели способны обеспечить максимальную скорость полета.
Реактивные двигатели делятся на два класса: ракетные и воздушно-реактивные .
В ракетных двигателях топливо и необходимый для его горения окислитель находятся непосредственно внутри двигателя или в его топливных баках.
На рисунке 5 показана схема ракетного двигателя на твердом топливе. Порох или какое-либо другое твердое топливо, способное к горению в отсутствие воздуха, помещают внутрь камеры сгорания двигателя.

При горении топлива образуются газы, имеющие очень высокую температуру и оказывающие давление на стенки камеры. Сила давления на переднюю стенку камеры больше, чем на заднюю, где расположено сопло. Вытекающие через сопло газы не встречают на своем пути стенку, на которую могли бы оказывать давление. В результате появляется сила, толкающая ракету вперед.
Суженная часть камеры - сопло служит для увеличения скорости истечения продуктов сгорания, что в свою очередь повышает реактивную силу. Сужение струи газа вызывает увеличение его скорости, так как при этом через меньшее поперечное сечение в единицу времени должна пройти такая же масса газа, что и при большем поперечном сечении.
Применяются также ракетные двигатели, работающие на жидком топливе.
В жидкостно-реактивных двигателях (ЖРД) в качестве горючего можно использовать керосин, бензин, спирт, анилин, жидкий водород и др., а в качестве окислителя, необходимого для горения, - жидкий кислород, азотную кислоту, жидкий фтор, пероксид водорода и др. Горючее и окислитель хранятся отдельно в специальных баках и с помощью насосов подаются в камеру, где при сгорании топлива развивается температура до 3000 °С и давление до 50 атм (рис. 6). В остальном двигатель работает так же, как и двигатель на твердом топливе.
Раскаленные газы (продукты сгорания), выходя через сопло, вращают газовую турбину, приводящую в движение компрессор. Турбокомпрессорные двигатели установлены в наших лайнерах Ту-134, Ил-62, Ил-86 и др.
Реактивными двигателями оснащены не только ракеты, но и большая часть современных самолетов.
Успехи в освоении космического пространства
Основы теории реактивного двигателя и научное доказательство воз-можности полетов в межпланетном пространстве были впервые высказаны и разработаны русским ученым К.Э. Циолковским в работе «Исследование мировых пространств реактивными приборами».
К.Э. Циолковскому принадлежит также идея применения многоступенчатых ракет. Отдельные ступени, из которых составлена ракета, снабжаются собственными двигателями и запасом топлива. По мере выгорания топлива каждая очередная ступень отделяется от ракеты. Поэтому в дальнейшем на ускорение ее корпуса и двигателя топливо не расходуется.
Идея Циолковского о сооружении большой станции-спутника на орбите вокруг Земли, с которой будут стартовать ракеты к другим планетам Солнечной системы, еще не осуществлена, но нет сомнения в том, что рано или поздно такая станция будет создана.
В настоящее время становится реальностью пророчество Циолковского: «Человечество не останется вечно на Земле, но в погоне за светом и пространством сначала робко проникнет за пределы атмосферы, а затем завоюет себе все околосолнечное пространство».
Нашей стране принадлежит великая честь запуска 4 октября 1957 г. первого искусственного спутника Земли. Также впервые в нашей стране 12 апреля 1961 г. был осуществлен полет космического корабля с космонавтом Ю.А. Гагариным на борту.
Эти полеты были совершены на ракетах, сконструированных отечест-венными учеными и инженерами под руководством С.П. Королева. Большие заслуги в исследовании космического пространства имеют американские ученые, инженеры и астронавты. Два американских астронавта из экипажа космического корабля «Аполлон-11» - Нейл Армстронг и Эдвин Олдрин - 20 июля 1969 г. впервые совершили посадку на Луну. На космическом теле Солнечной системы человеком были сделаны первые шаги.
С выходом человека в космос не только открылись возможности исследования других планет, но и представились поистине фантастические возможности изучения природных явлений и ресурсов Земли, о которых можно было только мечтать. Возникло космическое природоведение. Раньше общая карта Земли составлялась по крупицам, как мозаичное панно. Теперь снимки с орбиты, охватывающие миллионы квадратных километров, позволяют выбирать для исследования наиболее интересные участки земной поверхности, экономя тем самым силы и средства- Из космоса лучше различаются крупные геологические структуры: плиты, глубинные разломы земной коры - места наиболее вероятного залегания полезных ископаемых. Из космоса удалось обнаружить новый тип геологических образований кольцевые структуры, подобные кратерам Луны и Марса,
Сейчас на орбитальных комплексах разработаны технологии получения материалов, которые нельзя изготовить на Земле, а только в состоянии длительной невесомости в космосе. Стоимость этих материалов (сверхчистые монокристаллы и др.) близка к затратам на запуск космических аппаратов.
Литература
- Физика: Механика. 10 кл.: Учеб. для углубленного изучения физики / М.М. Балашов, А.И. Гомонова, А.Б. Долицкий и др.; Под ред. Г.Я. Мякишева. - М.: Дрофа, 2002. - 496 с.
Главная цель при передаче электроэнергии – повышение эффективности работы сетей. Следовательно, необходимо уменьшение потерь. Основной причиной потерь является реактивная мощность, компенсация которой значительно повышает качество электроэнергии.
Реактивная мощность вызывает ненужный нагрев проводов, перегружаются электроподстанции. Трансформаторная мощность и кабельные сечения вынужденно подвергаются завышениям, сетевое напряжение снижается.
Понятие о реактивной мощности
Для выяснения, что же такое реактивная мощность, надо определить другие возможные виды мощности. При существовании в контуре активной нагрузки (резистора) происходит потребление исключительно активной мощности, полностью расходуемой на энергопреобразование. Значит, можно сформулировать, что такое активная мощность, – та, при которой ток совершает эффективную работу.
На постоянном токе происходит потребление исключительно активной мощности, рассчитываемой соответственно формуле:
Измеряется в ваттах (Вт).
В электроцепях с переменным током при наличии активной и реактивной нагрузки мощностной показатель суммируется из двух составных частей: активной и реактивной мощности.
- Емкостная (конденсаторы). Характеризуется фазовым опережением тока по сравнению с напряжением;
- Индуктивная (катушки). Характеризуется фазовым отставанием тока по отношению к напряжению.

Если рассмотреть контур с переменным током и подсоединенной активной нагрузкой (обогреватели, чайники, лампочки с накаливающейся спиралью), ток и напряжение будут синфазными, а полная мощность, взятая в определенную временную отсечку, вычисляется путем перемножения показателей напряжения и тока.
Однако когда схема содержит реактивные компоненты, показатели напряжения и тока не будут синфазными, а будут различаться на определенную величину, определяемую углом сдвига «φ». Пользуясь простым языком, говорится, что реактивная нагрузка возвращает столько энергии в электроцепь, сколько потребляет. В результате получится, что для активной мощности потребления показатель будет нулевой. Одновременно по цепи протекает реактивный ток, не выполняющий никакую эффективную работу. Следовательно, потребляется реактивная мощность.
Реактивная мощность – часть энергии, которая позволяет устанавливать электромагнитные поля, требуемые оборудованием переменного тока.
Расчет реактивной мощности ведется по формуле:
Q = U x I x sin φ.
В качестве единицы измерения реактивной мощности служит ВАр (вольтампер реактивный).
Выражение для активной мощности:
P = U x I x cos φ.
Взаимосвязь активной, реактивной и полной мощности для синусоидального тока переменных значений представляется геометрически тремя сторонами прямоугольного треугольника, называемого треугольником мощностей. Электроцепи переменного тока потребляют две разновидности энергии: активную мощность и реактивную. Кроме того, значение активной мощности никогда не является отрицательным, тогда как для реактивной энергии возможна либо положительная величина (при индуктивной нагрузке), либо отрицательная (при емкостной нагрузке).

Важно! Из треугольника мощностей видно, что всегда полезно снизить реактивную составляющую, чтобы повысить эффективность системы.
Полная мощность не находится как алгебраическая сумма активного и реактивного мощностного значения, это векторная сумма P и Q. Ее количественное значение вычисляется извлечением квадратного корня из суммы квадратов мощностных показателей: активного и реактивного. Измеряться полная мощность может в ВА (вольтампер) или производных от него: кВА, мВА.
Чтобы была рассчитана полная мощность, необходимо знать разность фаз между синусоидальными значениям U и I.
Коэффициент мощности
Пользуясь геометрически представленной векторной картиной, можно найти отношение сторон треугольника, соответствующих полезной и полной мощности, что будет равно косинусу фи или мощностному коэффициенту:
Данный коэффициент находит эффективность работы сети.
Количество потребляемых ватт – то же самое, что и количество потребляемых вольтампер при мощностном коэффициенте, равном 1 или 100%.
Важно! Полная мощность тем ближе к показателю активной, чем больше cos φ, или чем меньше угол сдвига синусоидальных величин тока и напряжения.
Если, к примеру, имеется катушка, для которой:
- Р = 80 Вт;
- Q = 130 ВАр;
- тогда S = 152,6 BA как среднеквадратичный показатель;
- cos φ = P/S = 0,52 или 52%
Можно сказать, что катушка требует 130 ВАр полной мощности для выполнения полезной работы 80 Вт.
Коррекция cos φ
Для коррекции cos φ применяется тот факт, что при емкостной и индуктивной нагрузке вектора реактивной энергии располагаются в противофазе. Так как большинство нагрузок является индуктивными, подключив емкость, можно добиться увеличения cos φ.

Главные потребители реактивной энергии:
- Трансформаторы. Представляют собой обмотки, имеющие индуктивную связь и посредством магнитных полей преобразуюшие токи и напряжения. Эти аппараты являются основным элементом электросетей, передающих электроэнергию. Особенно увеличиваются потери при работе на холостом ходу и при низкой нагрузке. Широко используются трансформаторы в производстве и в быту;
- Индукционные печи, в которых расплавляются металлы путем создания в них вихревых токов;
- Асинхронные двигатели. Крупнейший потребитель реактивной энергии. Вращающий момент в них создается посредством переменного магнитного поля статора;
- Преобразователи электроэнергии, такие как силовые выпрямители, используемые для питания контактной сети железнодорожного транспорта и другие.
Конденсаторные батареи подсоединяются на электроподстанциях для того, чтобы контролировать напряжение в пределах установленных уровней. Нагрузка меняется в течение дня с утренними и вечерними пиками, а также на протяжении недели, снижаясь в выходные, что изменяет показатели напряжения. Подключением и отключением конденсаторов варьируется его уровень. Это делается от руки и с помощью автоматики.
Как и где измеряют cos φ
Реактивная мощность проверяется по изменению cos φ специальным прибором – фазометром. Его шкала проградуирована в количественных значениях cos φ от нуля до единицы в индуктивном и емкостном секторе. Полностью скомпенсировать негативное влияние индуктивности не удастся, но возможно приближение к желаемому показателю – 0,95 в индуктивной зоне.

Фазометры применяются при работе с установками, способными повлиять на режим работы электросети через регулирование cos φ.
- Так как при финансовых расчетах за потребленную энергию учитывается и ее реактивная составляющая, то на производствах устанавливаются автоматические компенсаторы на конденсаторах, емкость которых может меняться. В сетях, как правило, используются статические конденсаторы;
- При регулировании cos φ у синхронных генераторов путем изменения возбуждающего тока необходимо его отслеживать визуально в ручных рабочих режимах;
- Синхронные компенсаторы, представляющие собой синхронные двигатели, работающие без нагрузки, в режиме перевозбуждения выдают в сеть энергию, которая компенсирует индуктивную составляющую. Для регулирования возбуждающего тока наблюдают за показаниями cos φ по фазометру.

Коррекция коэффициента мощности – одна из эффективнейших инвестиций для сокращения затрат на электроэнергию. Одновременно улучшается качество получаемой энергии.
Видео
Сообщение от администратора:
Ребята! Кто давно хотел выучить английский?
Переходите по и получите два бесплатных урока
в школе английского языка SkyEng!
Занимаюсь там сам - очень круто. Прогресс налицо.
В приложении можно учить слова, тренировать аудирование и произношение.
Попробуйте. Два урока бесплатно по моей ссылке!
Жмите
Силу тяги можно определить через полезную мощность, и скорость транспортного средства (v):
Для автомобиля, поднимающегося в горку, которая имеет уклон , масса автомобиля m сила тяги (F T) войдет в уравнение:
где a – ускорение, с которым движется автомобиль.
Единицы измерения силы тяги
Основной единицей измерения силы в системе СИ является: =Н
В СГС: =дин
Формула силы тяги
В том случае, если тело при перемещении имеет ускорение, то на него кроме всех прочих обязательно действует некоторая сила, которая является силой тяги в рассматриваемый момент времени. В действительности, если тело движется прямолинейно и с постоянной скоростью, то сила тяги также действует, так как тело должно преодолевать силы сопротивления. Обычно силу тяги находят, рассматривая силы, действующие на тело, находя равнодействующую и применяя второй закон Ньютона. Жестко определенной формулы для силы тяги не существует.
Не следует считать, что сила тяги, например, транспортного средства действует со стороны двигателя, так как внутренние силы не могут менять скорость системы как единого целого, что входило бы в противоречие с законом сохранения импульса. Однако следует отметить, что для получения у силы трения покоя необходимого направления, мотор вращает колеса, колеса «цепляются за дорогу» и порождается сила тяги. Теоретически было бы возможно не использовать понятие «сила тяги», а говорить о силе трения покоя или силе реакции воздуха. Но удобнее внешние силы, которые действуют на транспорт делить на две части, при этом одни силы называть силами тяги , а другие — силами сопротивления . Это делается для того, чтобы уравнения движения не потеряли свой универсальный вид и полезная механическая мощность (P) имела простое выражение:
Примеры решения задач
Пример
Задание. На автомобиль имеющий массу 1 т при его движении по горизонтальной поверхности, действует сила трения, которая равна =0,1 от силы тяжести. Какой будет сила тяги, если автомобиль движется с ускорением 2 м/с?
Решение. Сделаем рисунок.

В качестве основы для решения задачи используем второй закон Ньютона:
Спроектируем уравнение (1.1) на оси X и Y:
По условию задачи:
Подставим правую часть выражения (1.4) вместо силы трения в (1.2), получим:
Переведем массу в систему СИ m=1т=10 3 кг, проведем вычисления:
Ответ. F T =2,98 кН
Для нахождения величины реактивной силы Р нет необходимости рассматривать детально распределение давления по внутренним и наружным стенкам реактивного аппарата. Реактивную силу можно определить в конечном виде с помощью уравнения количества движения. Совершая полет, тело производит возмущение в окружающей среде. Всегда можно выделить некоторую, достаточно большую, например цилиндрическую, область, границы которой выходят за пределы возмущенной части потока (рис.). На боковых границах этой области давление и скорость потока (считаем двигатель неподвижным, а воздух движущимся со скоростью полета) равны их значениям на бесконечности перед двигателем. Пусть ось х совпадает с направлением полета и является осью симметрии двигателя; спроектируем на ось х силы, действующие на двигатель и на поверхность выделенного контура. Так как силы давления в жидкости нормальны к поверхности, то проекции на ось х сил, действующих на боковые поверхности контура, обращаются в нуль. Поэтому уравнение Эйлера запишется так:
Здесь площади, на которые распространяются интегралы, и область интегрирования первого члена правой части бесконечны. Сила Р берется со знаком + потому, что здесь реактивный двигатель сообщает работу газу; − секундная масса воздуха, втекающая в контур через сечение F ; − дополнительная секундная масса горючего, которая подается в двигатель.
Если взять левую торцовую поверхность далеко перед двигателем, то давление на ней постоянно и равно атмосферному (), а скорость потока равна скорости полета (). Кроме того, можно допустить, что в поперечном направлении уже на некотором конечном расстоянии от поверхности двигателя поток является невозмущенным и площадь F , на которую распространяются интегралы левой части, считать конечной; точно так же конечной будет и область интегрирования в первом члене правой части. Тогда следует написать:
В большом числе случаев возмущение, вызываемое летящим телом, настолько незначительно, что в плоскости среза сопла а (вне струи выхлопных газов) давление обтекающего потока мало отличается от давления на бесконечности (). Тогда силы давления на передней и задней торцовых поверхностях контура уравновешиваются везде, кроме участка, соответствующего поперечному сечению выхлопной струи (). Скорости потока во всех элементарных струйках, кроме проходящих через двигатель, одинаковы (пренебрегаем влиянием трения, вихревых и волновых потерь на наружной поверхности двигателя). Следовательно, изменение количества движения получается только в струе, протекающей сквозь двигатель. Тогда уравнение Эйлера принимает следующий вид:
откуда получается основная формула для реактивной силы
В этих выражениях − средняя скорость истечения.
Следует подчеркнуть, что полученное соотношение справедливо только в том случае, если скорость и давление в плоскости а (за исключением участка рабочей струи) равны в точности их значениям на бесконечности перед двигателем. Кроме того, мы здесь пренебрегаем внешним лобовым сопротивлением двигателя, которое всегда может быть учтено отдельно.
На расчетном режиме работы реактивного двигателя давление в выхлопной струе равно давлению окружающего воздуха (); в этом случае тяга равна изменению количества движения газа, прошедшего через двигатель:
В воздушно-реактивных двигателях второй член правой части мал, и им часто пренебрегают, т.е. принимают для воздушно-реактивных двигателей в расчетном случае
Тяга жидкостного реактивного двигателя, в котором не используется атмосферный воздух, определяется для расчетного режима по формуле
или на нерасчетном режиме
Здесь GO - секундный массовый расход окислителя.
О месте приложения реактивной силы.
Выясним, в каком месте двигателя приложена реактивная сила. Рассмотрим простейший случай − идеальный прямоточный воздушно-реактивный двигатель (рис.). Пусть скорость во входном отверстии равна скорости полета (); тогда давление во входном отверстии равно атмосферному (), кроме того, предположим, что двигатель работает на расчетном режиме, т. е. давление в выходном отверстии также равно атмосферному (). При малой скорости движения газа в камере сгорания давление в последней можно считать постоянным (). В описанном идеальном двигателе перепады давлений в диффузоре и сопле одинаковы: ![]()
 Однако ввиду того, что в сопле воздух имеет более высокую температуру, чем в диффузоре, площадь выходного отверстия двигателя должна быть больше площади входного отверстия. В самом деле, в идеальном двигателе скоростной напор в выходном отверстии равен скоростному напору набегающего потока, т.е. в рассматриваемом случае скоростному напору во входном отверстии
Однако ввиду того, что в сопле воздух имеет более высокую температуру, чем в диффузоре, площадь выходного отверстия двигателя должна быть больше площади входного отверстия. В самом деле, в идеальном двигателе скоростной напор в выходном отверстии равен скоростному напору набегающего потока, т.е. в рассматриваемом случае скоростному напору во входном отверстии
С учетом этого равенства, из уравнения неразрывности получаем:

Следовательно, при подводе тепла в камере сгорания () имеем:
![]()
Итак, среднее давление, действующее на стенки диффузора и сопла, одно и то же, а проекция стенки диффузора на плоскость, перпендикулярную к оси двигателя, больше соответствующей проекции стенки сопла. Вследствие изложенного сила давления изнутри на диффузор () больше, чем на сопло (); направления этих сил, как явствует из рис., противоположны.
Если внешние очертания двигателя являются очень плавными, то давление воздуха на внешнюю поверхность двигателя весьма близко к атмосферному, т. е. силой давления на внешнюю поверхность можно пренебречь. В рассматриваемом идеальном случае реактивная сила, действующая на двигатель, сводится к разности сил, приложенных соответственно к диффузору и соплу:
![]()
Величины сил, действующих на диффузор и сопло, соответственно равны

Согласно принятым выше условиям
![]()
Рассмотрим двигатель с малыми скоростями в камере сгорания, т. е. с площадью камеры, существенно большей, чем площади входного и выходного отверстий:
![]()
В этом случае мы приходим к следующей простой формуле для реактивной силы, определенной в результате вычитания силы, приложенной к соплу, из силы, приложенной к диффузору:
![]()
Тот же результат можно получить непосредственно из формулы для реактивной силы
или, учитывая выведенное выше условие ,
![]()
Итак, тяга получается за счет того, что сила давления на диффузор больше, чем на сопло. Это является следствием подогрева газа, в связи с которым площадь выходного отверстия приходится делать больше площади поперечного сечения набегающей струи.
В прямоточном воздушно-реактивном двигателе реактивная сила является результирующей сил давления, приложенных к стенкам внутреннего и наружного обводов двигателя.
Полезная часть реактивной силы, равная разности между реактивной силой и суммарным внешним сопротивлением двигательной установки, называется эффективной тягой:
Реактивная сила двигателя, определяемая формулой (105), может рассматриваться как разность между выходным импульсом струи газов, рассчитанным по избыточному давлению на срезе сопла:
и входным импульсом струи набегающего невозмущенного потока воздуха, засасываемого в двигатель:
Оценку внутренней тяги двигателя (без учета внешнего сопротивления) производят с помощью относительного импульса (116)
Величина
называется потерянным относительным импульсом сопла.






